A classic software based solution
to the critical section problem is Peterson’s solution. It is not guaranteed that
Peterson’s solution will work correctly on modern architectures.
Peterson’s solution is restricted
to two processes that alternate execution between their critical sections and
remainder sections.
Peterson’s solution requires the
two processes to share two data items:
int turn; - Indicates whose
turn it is to enter into the critical section. If turn = = i, then process i is
allowed into their critical section.
boolean flag[2];
- Indicates
when a process wants to enter into their critical section.
When process i wants to enter their critical section, it sets flag[ i ] to
true.
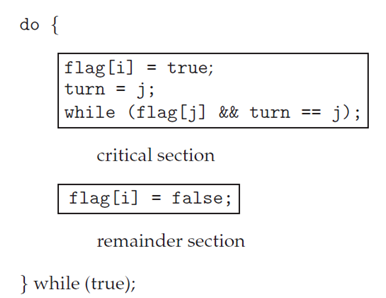
In the above diagram, the entry
and exit sections are enclosed in boxes.
- In
the entry section, process i first raises a flag indicating a desire to
enter the critical section.
- Then
turn is set to j to allow the other process
to enter their critical section if process j desires.
- The
while loop is a busy loop ( notice the semicolon at the end ), which makes
process i wait as long as process j has the turn and wants to enter the
critical section.
- Process
i lowers the flag[ i ] in the exit section, allowing process j to continue
if it has been waiting.
To prove that the solution is
correct, examine the three conditions listed:
- Mutual exclusion - If
one process is executing their critical section when the other wishes to
do so, the second process will become blocked by the flag of the first
process. If both processes attempt to enter at the same time, the last
process to execute "turn = j" will be blocked.
- Progress - Each process can only be
blocked at the while if the other process wants to use the critical
section (flag[j] = = true), AND it is the other process's turn to use the
critical section (turn = = j). If both of those conditions are true, then
the other process ( j ) will be allowed to enter the critical section, and
upon exiting the critical section, will set flag[ j ] to false, releasing
process i. The shared variable turn assures that only one process at a
time can be blocked, and the flag variable allows one process to release
the other when exiting their critical section.
- Bounded Waiting - As
each process enters their entry section, they set the turn variable to be
the other processes turn. Since no process ever sets it back to their own
turn, this ensures that each process will have to let the other process go
first at most one time before it becomes their turn again.
No comments:
Post a Comment